Going to start reading the gyroscope tonight. This is the GY-91 module, a sensor fusion device with accelerometers, a gyroscope; it has a digital compass and it has a barometer. I am most interested in the accelerometer readings, particularly in the y direction. As the board becomes level this value will approach 0. This is the tutorial I used to obtain and best understand the values I can read from this board
https://www.youtube.com/watch?v=M9lZ5Qy5S2s
Fusion sensor chips are pretty interesting. With the rather new MEMs technology available they are able to fit a lot on these little chips. Gathering accelerometer data and gyroscopes and magnetoscopes. Their is a lot to read in the manual/datasheets. Taking care in utilizing good practice; as in writing certain configurations to proper registers and making so everything is correctly initialized for your math. Also, I liked the methods in this youtube video for bitbanging data out from the registers
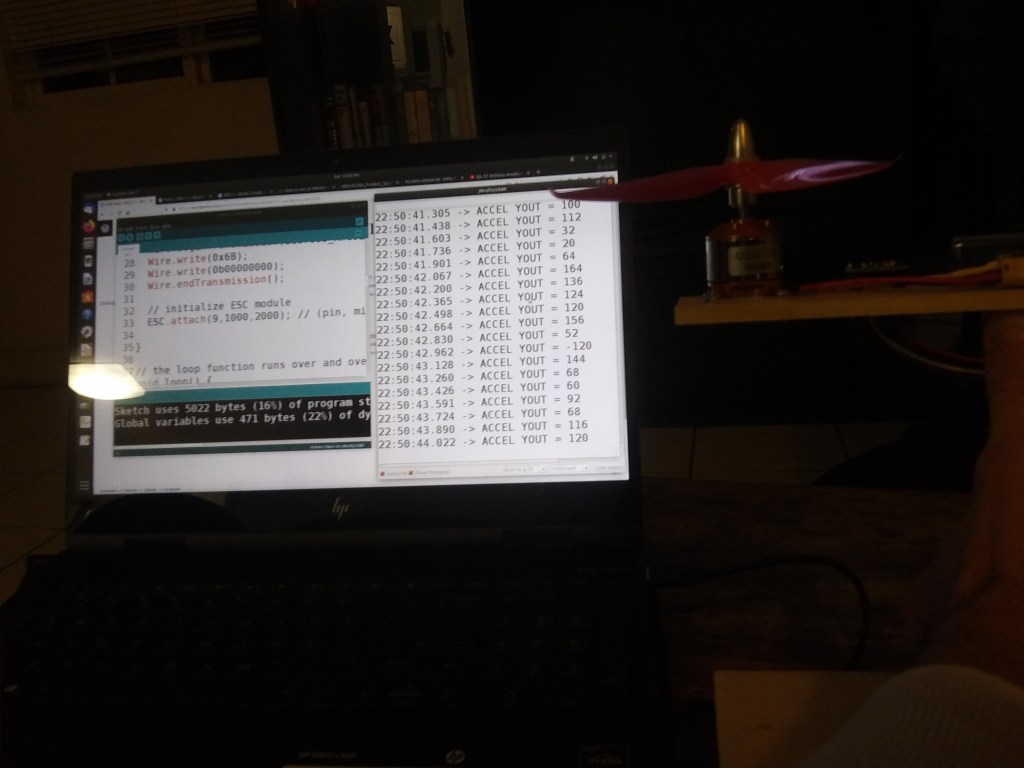
While experimenting, I noticed a flaw in my design. The accelerometer operates correctly when the propeller is turned off, but once you start flying with the drone motor the number fluctuate wildly. It appears the airflow from the propeller is detected by the module mounted directly (unprotected) underneath. I believe mounting the GY-91 under the arm and building a protective covering around it though will solve the problem.